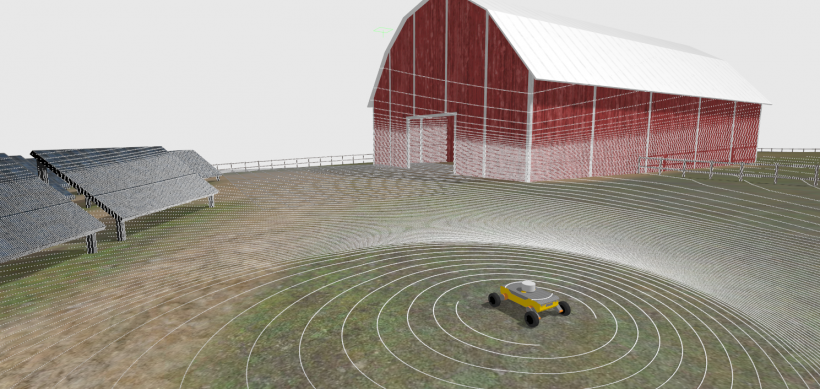



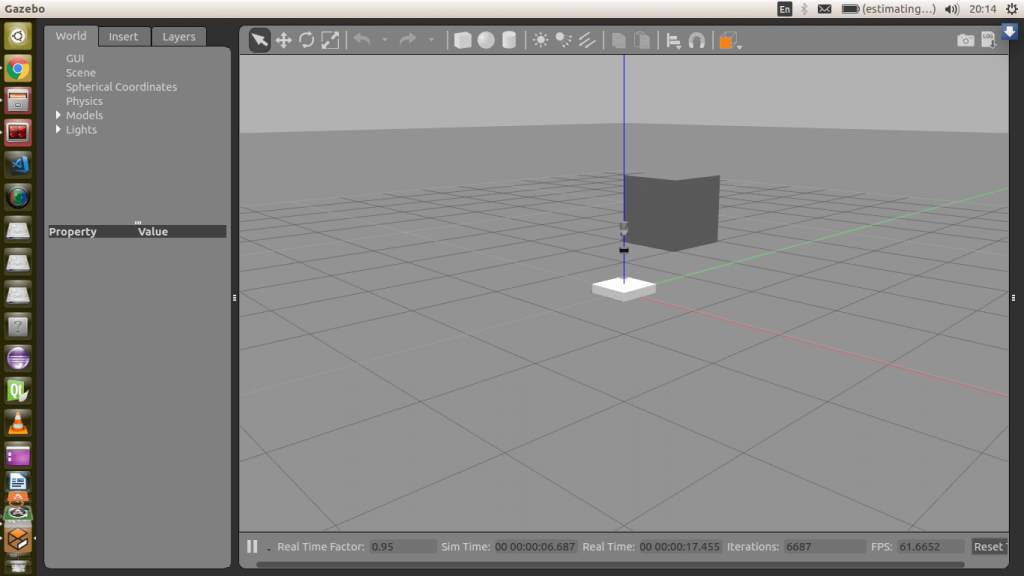

Gazebo velodyne outlet
Gazebo velodyne outlet, Enhance your Gazebo lidar s accuracy with the RGL plugin Robotec.ai outlet
4.59 (1283)
Limited-Time Special
$38.99 (50% off) $77.98
Color:
Size: Please select
Product Details
Web ID: 889
obstacle detect by velodyne data using Autoware in Gazebo environment outlet, Robotics Free Full Text Simulating Ionising Radiation in outlet, Gazebo outlet, Velodyne LIDAR ROS Gazebo outlet, ray sensor not publishing points properly ROS Answers Open outlet, Gazebo ROS Simulation Pionneer 2DX IMU GPS Velodyne HDL 32E outlet, gazebo Velodyne gazebo velodyne CSDN outlet, velodyne ray sensor not publishing points properly Robotics outlet, Gazebo Topics outlet, Velodyne outlet, Shorts ROS Simulation 3D Lidar Velodyne Point Cloud Rviz Visualisation outlet, Velodyne LIDAR ROS Gazebo outlet, Gazebo velodyne simulator ROS2 Qiita outlet, Person detection using velodyne in gazebo outlet, gazebo tutorials velodyne velodyne plugin velodyne plugin.cc at outlet, gazebo 16 velodyne gazebo CSDN outlet, Velodyne LIDAR ROS Gazebo outlet, GitHub agn 7 agn gazebo Several Gazebo models in order to outlet, Getting started with Gazebo Robotics. And other stuff too outlet, Real2Sim gazebo Realistic Velodyne64 E in Gazebo General ROS outlet, Enhance your Gazebo lidar s accuracy with the RGL plugin Robotec.ai outlet, LIDAR model publishes upside down pointcloud Gazebo Q A Forum outlet, GitHub lmark1 velodyne simulator URDF description and Gazebo outlet, How to calculate distance of a target using Velodyne hdl32 on outlet, Real2Sim gazebo Realistic Velodyne64 E in Gazebo General ROS outlet, GitHub Rocknz gazebo velodyne outlet, Getting started with Gazebo Robotics. And other stuff too outlet, Turtlebot3 Velodyne Lidar Integration in ROS Gazebo PCL Part 2 outlet, Velodyne VLP 16 is showing only 1 beam instead of 16 beams in outlet, Getting started with Gazebo Robotics. And other stuff too outlet, Real2Sim gazebo Realistic Velodyne64 E in Gazebo General ROS outlet, Working with Point Cloud Library in ROS Gazebo PCL Part 1 by outlet, gazebo velodyne plugin control outlet, Object detection using 3D Velodyne LiDAR with ROS Gazebo Rviz outlet, Working with Point Cloud Library in ROS Gazebo PCL Part 1 by outlet, Product Info: Gazebo velodyne outlet
.
.