


Turtlebot urdf outlet
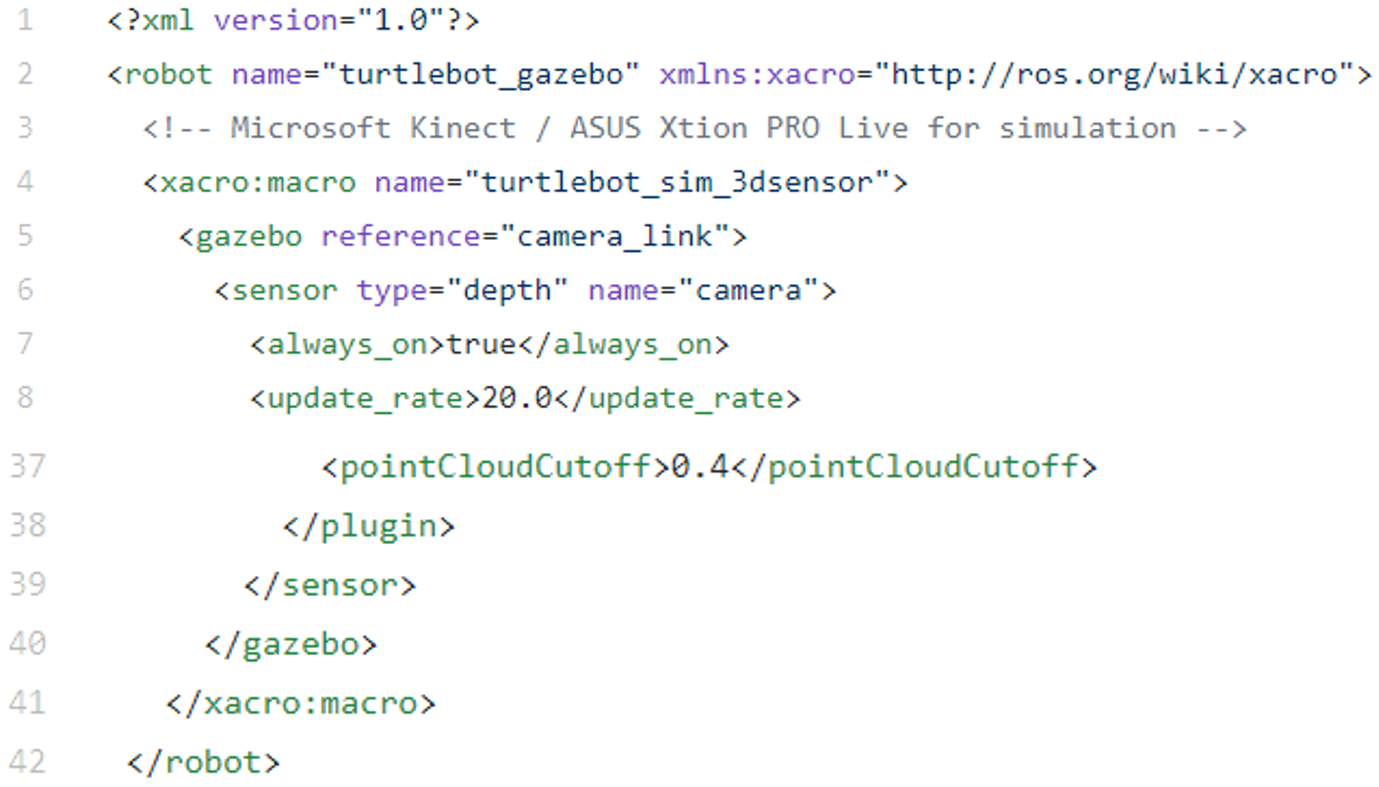
Turtlebot urdf outlet, cannot find turtlebot.urdf.xacro file. Issue 216 turtlebot outlet
4.64 (1271)
Limited-Time Special
$39.99 (50% off) $79.98
Color:
Size: Please select
Product Details
Web ID: 889
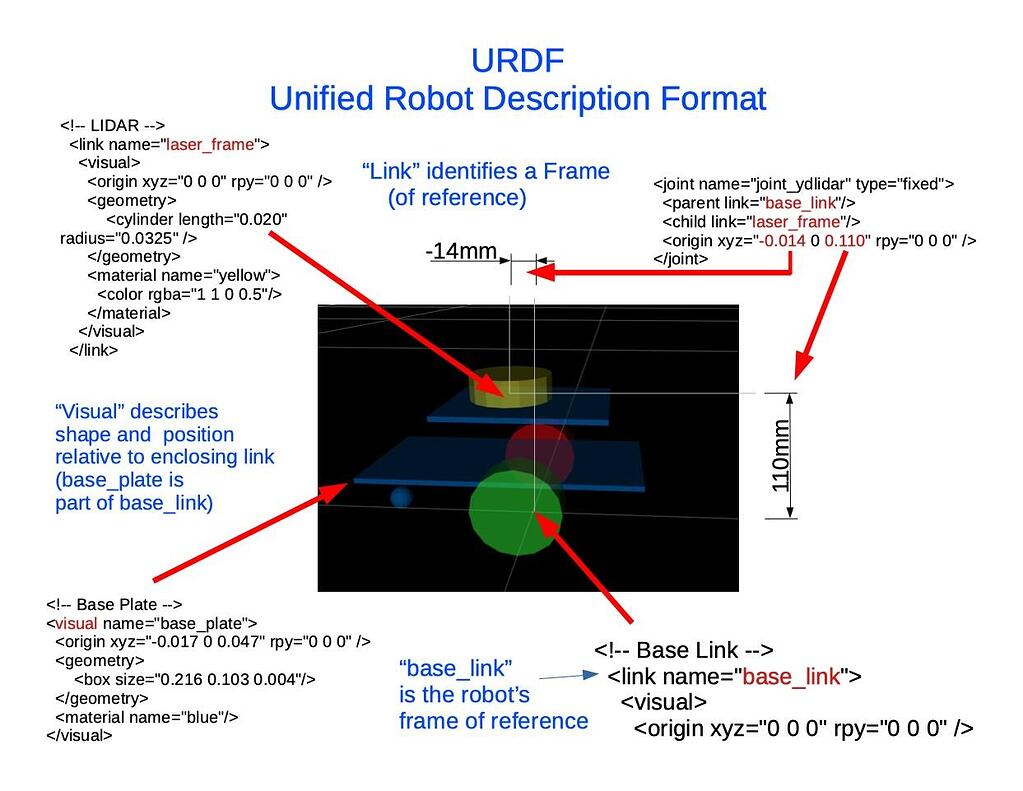
Navigating with a Physical Turtlebot 3 Navigation 2 1.0.0 outlet, ROS Robotics By Example Second Edition outlet, Install TurtleBot 3 in ROS and Run Simulation in Gazebo Robot outlet, Turtlebot 2i structure Download Scientific Diagram outlet, URDF y TF Robotics Lab outlet, What Is URDF Definition and Popular Examples outlet, ros How to convert .xarco to .urdf for Nvidia Isaac Sim Stack outlet, Error for bringup of turtlebot r ROS outlet, Import rigid body tree model from URDF Xacro SDF file text or outlet, TurtleBot3 outlet, Turtlebot outlet, ROS Robotics By Example Second Edition outlet, Indoor Mobile Robot Robotic Microcontroller Educational outlet, Correctly Install TurtleBot3 Robot in ROS and Simulate Movement in Gazebo 3D Worlds ROS Tutorial outlet, Not able to control Turtlebot3 with ROS 2 Isaac Sim NVIDIA outlet, URDF Introduction ROS2 GoPiGo3 gpgMin.urdf GoPiGo Dexter outlet, Create your own robot based on TurtleBot by Jie Wang Medium outlet, Making a Mobile Robot 2 Concept Design URDF Articulated Robotics outlet, No transform between turtlebot wheel links and base link. Exercise outlet, How to publish velocity to Turtlebot Move Turtlebot Gazebo ROS Tutorial for Beginners outlet, cannot find turtlebot.urdf.xacro file. Issue 216 turtlebot outlet, Create your own robot based on TurtleBot by Jie Wang Medium outlet, Why isn t xacro detecting my outlet, Installing Turtlebot 3 simulator in Ubuntu 14.04 Cyan Infinite outlet, TurtleBot2 outlet, How to add flag urdf into turtlebot r ROS outlet, Create your own robot based on TurtleBot by Jie Wang Medium outlet, TurtleBot3 outlet, Fixing Functional Problems in URDF Details Hackaday.io outlet, TurtleBot3 outlet, turtlebot turtlebot description urdf turtlebot kinect.urdf.xacro outlet, GitHub mirellameelo Turtlebot Unity URDF outlet, Turtlebot model in gazebo Download Scientific Diagram outlet, Making a Mobile Robot 2 Concept Design URDF Articulated Robotics outlet, REP 119 Specification for TurtleBot Compatible Platforms ROS outlet, Product Info: Turtlebot urdf outlet
.
.